|
Эта статья опубликована на сайте Электрик - электричество и энергетика http://electrik.org/ URL этой статьи: http://electrik.org/news/article106.php СТАБИЛИЗАТОР ЧАСТОТЫ ВРАЩЕНИЯ КОЛЛЕКТОРНОГО ЭЛЕКТРОДВИГАТЕЛЯ Статьи / Электродвигатели. Послано electrik 29 Фев, 2004 г. - 21:42 |
|
В. ТУШНОВ, г. Луганск, Украина Широкое применение в электроприводах различных механизмов находят коллекторные двигатели с независимым возбуждением. Они создают значительный крутящий момент, позволяя при этом изменять частоту вращения вала от нулевой до максимальной рабочей. Автору предлагаемой статьи удалось изготовить сравнительно простое устройство для ручного регулирования частоты вращения подобного электродвигателя, автоматически поддерживающее ее постоянной при изменениях напряжения питания и механической нагрузки на вал. Устройства управления коллекторными электродвигателями с независимым возбуждением делят на две основные группы широтно-импульсные и фазовые регуляторы Последние зарекомендовали себя более надежными Однако промышленные изделия такого типа построены по слишком громоздким схемам Анализ показал, что их можно значительно упростить без ухудшения технических характеристик Предлагаемый стабилизатор и регулятор частоты вращения предназначены для двигателей КПА-563, КПК-564 и аналогичных мощностью 90 -120 Вт при напряжении питания до 42 В 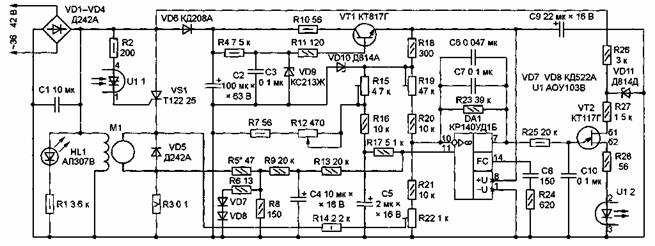 Схема устройства показана на рисунке На электродвигатель М1 подают пульсирующее напряжение, полученное с помощью диодного моста VD1 — VD4 из переменного 36 42 В Цепь VD6C2 превращает пульсирующее напряжение в постоянное, которым через стабилизатор напряжения на стабилитроне VD9 и транзисторе VT1 питают микросхему DA1 Светодиод HL1 служит индикатором включения питания Со стабилитрона VD10 снимают образцовое напряжение для цепей стабилизации и регулирования Требуемую частоту вращения устанавливают переменным резистором R12, изменяющим напряжение которое подают на неинвертирующий вход ОУ DA1 через фильтр R15C5R16 Здесь его суммируют с напряжением обратной связи по току Последнее снимают с резистора R3, включенного последовательно в цепь якоря двигателя М1, и подают на вход ОУ через делитель напряжения R5R8 и фильтрRЗС4R13 Элементы R6 VD7, VD8 ограничивают напряжение токовой обратной связи при перегрузках двигателя На инвертирующем входе ОУ DA1 образцовое напряжение, поступающее через резисторы R19 и R20, суммируют с напряжением, которое снимают с якоря двигателя М1 и подают на ОУ через резисторы R14, R21, R22 ОУ DA1 включен по схеме интегрирующего усилителя, коэффициент передачи и постоянная времени которого определяют характеристики системы стабилизации в целом Выходное напряжение ОУ управляет формирователем импульсов на однопереходном транзисторе VT2 От их длительности зависят угол открытия тринистора VS1 и среднее значение тока, протекающего через обмотку якоря двигателя М1 Оптрон U1 изолирует цепи управления от силовых В устройстве использованы конденсаторы С1 — МБГО или МБГЧ, С2, С4, С5, С9 — К50-35, С7, СЮ — серий К73, СЗ, С6, С8 — малогабаритные керамические резисторы R2 — С5-16, R15, R19, R22 — СП5-2, R12 — ППБ-1В, остальные — МЛТ При замене КР140УД1Б другим ОУ, например, К140УД6, следует учесть их различия в назначении выводов и параметрах цепей коррекции Для налаживания стабилизатора необходим регулируемый источник переменного напряжения 36 42 В Кроме того, нужно иметь возможность контролировать частоту вращения вала двигателя при изменении механической нагрузки на него Простой и удобный датчик частоты вращения — обычная магнитофонная головка, установленная на расстоянии нескольких миллиметров от вала на котором закреплен небольшой постоянный магнит Импульсы наведенные в обмотке головки, можно наблюдать на экране осциллографа, а их частоту — измерять частотомером Переменную механическую нагрузку на вал создают прижимая к нему кусок плотной резины Этот способ пригоден для двигателей мощностью не более 200 Вт Приступая к налаживанию вместо постоянного резистора R5 устанавливают подстроечный номиналом 470 Ом Движок переменного резистора R12 переводят в положение, соответствующее минимальному сопротивлению Включив питание, подстроенным резистором R19 добиваются полной остановки двигателя Затем подстроенным резистором R15 заставляют двигатель начать вращение с минимальной скоростью После этого движок переменного резистора R12 устанавливают в среднее положение и, дождавшись разгона двигателя до постоянной скорости, механически нагружают его вал Изменением сопротивления резистора R5 добиваются минимальной зависимости частоты вращения от нагрузки Теперь подстроечный резистор можно заменить постоянным нужного сопротивления Подстроечный резистор R22 устанавливают в положение, в котором обороты двигателя остаются практически постоянными при изменении напряжения питания на 10 20 % Затем вновь уменьшают сопротивление резистора R12 до минимума и подстроенным резистором R19 устанавливают частоту вращения равной нижней границе заданного интервала регулирования. На этом налаживание стабилизатора закончено. С вопросами можете обращаться по почте info@electrik.org [1] или посетив мой сайт: electrik.org [2]. Всего хорошего. 2004 г. Кузнецов Олег |
|
Ссылки в этой статье [1] info@electrik.org [2] http://electrik.org |