|
Эта статья опубликована на сайте Электрик - электричество и энергетика http://electrik.org/ URL этой статьи: http://electrik.org/news/article55.php АВТОМАТ УПРАВЛЕНИЯ НАСОСОМ. И.НЕЧАЕВ Статьи / Разное, не вошедшее в другие темы. Послано electrik 23 Ноя, 2003 г. - 22:40 |
|
Как известно, в автоматах управления насосом в качестве датчиков уровня зачастую используют электрические контакты, «замыкающиеся» благодаря электропроводности воды, В предлагаемой же конструкции использованы электрические датчики, реагирующие на разность теплопроводностей воды и воздуха. Автомат с такими датчиками способен поддерживать уровень воды в резервуарах из любого материала. В этом устройстве датчиками уровня служат терморезисторы с положительным температурным коэффициентом сопротивления (ТКС) — позисторы. Отличительная их особенность в том, что в диапазоне темперагуры 40.. 100 С их ТКС может достигать 15 %/С, а кратность изменения сопротивления —1000...10 000. Позисторы к тому же малогабаритные. 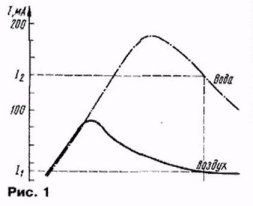  Принцип работы подобных датчиков уровня иллюстрирует рис. 1. В случае работы позистора на воздухе ч увеличение напряжения на нем от 0 до 7 В его характеристика сравнительно линейна. Дальнейшее увеличение напряжения ведет к саморазогреву позисто-ра, в результате чего его сопротивление увеличивается, а потребляемый ток начинает уменьшаться. При напряжении примерно 20 В его температура может подняться до 70...1000C, а потребляемый ток уменьшиться до 30 мА. Если такой датчик поместить в воду, то за счет ее большой теплопроводности саморазогрев датчика начинается при большем питающем напряжении, а значит, и при большем потребляемом токе. Следовательно, ток через позис-тор в диапазоне напряжений 12...20 В сильно зависит от того, в какую среду он помещен и может изменяться в несколько раз. Например, при напряжении источника питания 20 В ток через позистор в воздухе может быть 30 мА. а в воде — 120 мА, то есть в четыре раза больше. Этот эффект позистора и используется для автоматического управления работой насоса. Схема автомага приведена на рис. 2. Если датчики уровня RK1 и RK2 находятся в воздухе, то сразу после подключения устройства к сети через них потечет ток, превышающий порог срабатывания герконовых реле К1 и К2, работающих как датчики тока. Срабатывая, они контактамиК1.1 иК2.1 замыкают цепь питания электромагнитного реле КЗ, В этот момент загорается светодиод HL1, контакты КЗ.2 репе КЗ размыкаются и электродвигатель насоса обесточивается. Через 30...60 с (время реакции позистороа) ток через датчики уменьшится, контакты К1.1 и К2.1 реле К1 и К2 разомкнутся, обмотка КЗ обесточится. светодиоа погаснет и автомат включит питание насоса. Когда вода в резервуаре достигнет датчика RK2 нижнего уровня, ток через него и реле К2 резко увеличится. Реле К2 при этом сработает, контакты реле К1 в это время разомкнуты, поэтому реле КЗ останется обесточенным и насос будет продолжать работать Так будет продолжаться до тех пор, пока вода не достигнет датчика верхнего уровня RK1, его сопротивление уменьшится и сработает реле К1. Реле КЗ тоже сработает, загорится светодиод, а контакты КЗ.2, размыкаясь, выключат насос. Это означает, что резервуар наполнен до установленного уровня. Если теперь вода будет расходоваться, то вскоре датчик RK1 верхнего уровня окажется в воздухе, его сопротивление увеличится и контакты K1.I разомкнутся. А поскольку эти контакты заблокированы контактами КЗ. 1 реле КЗ, то состояние автомата не изменится — насос будет отключен. Когда же уровень воды в резервуаре окажется ниже датчика RK2, контакты К2.1 реле К2 разомкнутся, реле КЗ обесточится, насос вновь включится и будет работать до тех пор, пока уровень воды снова не достигнет датчика РК1. Конструкция датчика показана на рис. 3. Он состоит из металлической (желательно медной) шайбы 2 с припаянным к ней позистором 1, Толщина шайбы может быть 0,3...0,5 мм, а диаметр — немного больше диаметра позистора. Этот чувствительный элемент датчика закрыт сверху корпусом 3 из изоляционного материала с плохой теплопроводностью,например, стеклотекстолита, фторопласта. Все пустоты внутри и место ввода соединительных проводов 5 залиты эпоксидной смолой 4. Сверху датчик, кроме, конечно, шайбы, покрывают защитным водостойким лаком или краской. Рекомендуется следующая последовательность изготовления датчика. К шайбе нужно припаять поэистор и соединительные провода (с запасом). Затем этот уэел со стороны позистора покрыть водостойким лаком («Марс», «Феникс») и подать на него напряжение постоянного тока примерно 20 В. При этом позистор саморазогревается, эпоксидная смола вспенивается и быстро высыхает. Этот процесс надо повторить 2-3 раза, после чего покрыть позистор слоем смолы и дать ему высохнуть в нормальных условиях. Это обеспечит позистору надежную теплоизоляцию от корпуса и защиту от воды. Остается наполнить корпус эпоксидной смолой, разместив в нем позистор с шайбой. Излишек смолы удаляют. 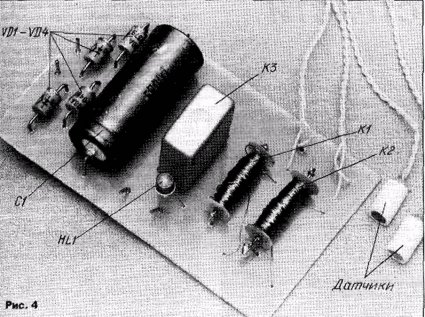 Внешний вид конструкции электронной части автомата показан на рис. 4, а печатная плата и размещение деталей на ней — на рис. 5. Диоды VD1—VD4 выпрямительного моста могут быть КД105 с буквенными индексами Б — Г, КД208А, КД212А, КД212Б, Д226Б или диодная сборка серии КЦ402; светодиод HL1 — серии АЛ307 или АЛ341 с индексами Б— Г. КонденсаторС1 - К50-24, К50-6. 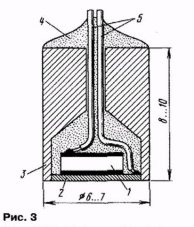 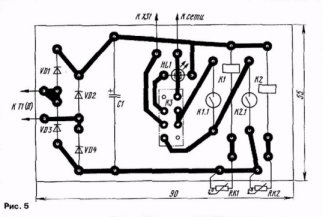 РелеК1 и К2 самодельные. Это — герконы типа КЭМ-2 (или аналогичные), на корпуса которых намотаны катушки, содержащие ло 380—400 витков провода ПЭВ-2 0,2, Оптимальное число витков подбирают опытным путем, добиваясь, чтобы ток срабатывания герконоаого реле был примерно 90 мА, а ток отпускания — около 50 мА. Электромагнитное реле КЗ — РЭС48 (паспорт РС4.590.201). Можно также использовать реле РЭС9, РЭС22, РКМ, срабатывающее при напряжении 15...17 В. Но тогда придется соответственно доработать печатную плату. Трансформатор Т1 — любой подходящий, обеспечивающий на вторичной обмотке переменное напряжение 15...17 В при токе нагрузки до 300 мА, Поэисторы датчиков — СТ6-1а или аналогичные. Налаживание устройства начинают с проверки характеристики датчиков. Для этого при номинальном напряжении питания позистора измеряют текущий через него ток при помещении датчика в воду и на воздухе. При этом учитывают постоянную времени датчика, то есть проводят измерения после установления теплового равновесия. Затем, в случае необходимости, под- бором числа витков обмоток реле К1, К2 устанавливают необходимые токи срабатывания. Датчики в воде располагают таким образом, чтобы плоскость шайбы была в вертикальном положении. Это исключает скопление пузырьков воздуха на шайбе при нагревании воды, что ухудшает отвод тепла от датчика. С вопросами можете обращаться по почте info@electrik.org [1] или посетив мой сайт: electrik.org [2]. Всего хорошего. 2003 г. Кузнецов Олег |
|
Ссылки в этой статье [1] info@electrik.org [2] http://electrik.org |